
By Kumar David –
Prof. Kumar David
It does seem a bit unfair, after all Thomas Piketty did prove Marx right on one crucial point. He has done a splendid job validating on one of Marx’s key expectations (Relatively, the rich will get richer and the poor poorer); but after saying ‘thank you very much’ all the world’s Marxists are savaging the fellow mercilessly. Maybe they feel reinvigorated these post-2008 days, think all-the-world lies intellectually prostrate at their feet, and show little mercy to deviants. Poor Piketty has done huge data collection and processing for which we should be grateful. An unknown guy comes out of nowhere and establishes something the Master’s disciples have been saying for 150 years but could not prove empirically. A data savvy young group after 10 years hard labour proves sustained and expanding wealth-inequality; they deserve more than a thank-you nod. True Piketty is weak on theory and abstraction; but be kind; perhaps the bugger can be trained. Capital in the Twenty-first Century is outselling everything on Amazon’s list, pulp fiction, do-it-yourself, even thrillers, which is remarkable for a 600 page tome on economics.
 The excitement is because Piketty, a youngish French economist and his team, have amassed a mountain of data about the English and German capitalist economies from the Industrial Revolution two hundred years ago to the present and processed it to come up with an unremarkable finding. It is as well known as the sun setting in the west that inequity grows ever more acute when capitalism is left to itself without the heavy hand of state intervention, war or revolution. Feeling it in your bones is one thing, but page after page of data, statistical layouts, charts and graphs is another. That’s Piketty’s contribution; he shows from raw data that capitalism, if allowed to function normally and undisturbed, possesses a natural dynamic that swells wealth inequality between the very rich and the rest of society without limit. The cynic might say that this has been known all along; but the book establishes this from a mountain of 150 years of data.
The excitement is because Piketty, a youngish French economist and his team, have amassed a mountain of data about the English and German capitalist economies from the Industrial Revolution two hundred years ago to the present and processed it to come up with an unremarkable finding. It is as well known as the sun setting in the west that inequity grows ever more acute when capitalism is left to itself without the heavy hand of state intervention, war or revolution. Feeling it in your bones is one thing, but page after page of data, statistical layouts, charts and graphs is another. That’s Piketty’s contribution; he shows from raw data that capitalism, if allowed to function normally and undisturbed, possesses a natural dynamic that swells wealth inequality between the very rich and the rest of society without limit. The cynic might say that this has been known all along; but the book establishes this from a mountain of 150 years of data.
Today, current data is available in company reports, government and multilateral agency statistics (the data in US Federal and State statistical sites is gigantic) as well as university research output. What is more, data, going back decades and centuries, is being uncovered, published and the Internet makes access easy. Marx would have given an arm and a leg for this detail of information; instead he toiled for thirty years in the British Museum Reading Room poring over parliamentary reports, factory inspector’s bulletins, trade journals and newspapers. Darwin sailed around the world collecting specimens and laboured for a quarter of a century visiting animal breeders and scientists at great museums and laboratories. Finally, both arrived at ground-breaking conceptual revolutions. It is amazing that to see farther we are still standing on their shoulders, fitting in the findings of thousands of new researchers and volumes of new data, and pushing forward frontiers.
Maito says Piketty made an ass of himself
Argentinian Esteban Ezequiel Maito and a phalanx of other Marxists have shot down Piketty’s critique of Marx’s “Tendency of the Rate of Profit to Fall” (TRPF) thesis. I will make no attempt to recap Marx’s detailed workings in Volume 3 but his conclusion is this. In general, under normal circumstances, as capitalism goes through its life cycle, the rate of profit declines. Ok it may go up and down and fluctuate for a year or two, but if a long term view, say of a decade is taken, a secular decline is the theoretical norm. Marx said this was so for reasons to do with the accumulation, development, competition and the capital-labour relationship, that is a natural part of the capitalist process. Therefore Marxists see TRPF as a natural Law of capitalism.
It’s a Law, and it’s a Tendency; now isn’t that a contradiction? Not at all! Newton’s Law of Gravitation says that apples will fall to the ground with a known acceleration. However, it does not deny that if you stand under the tree and catch it, or if you bounce it back with a tennis racket it will behave differently. A Law and contingent differences that occur if something violates the assumptions of the Law (e.g. Marx’s normal evolution of capitalism, Newton’s not interfering with the motion of the apple) are theoretically compatible. This is why Marx used the qualifier “Tendency” to preface TRPF because he granted that: (a) If there was a new invention that caused a spurt in productivity, (b) harsh political changes (a military coup for example) crushed workers and drove down wages, (c) new markets (colonies, globalisation) or production centres (China in recent decades) were opened, then the rate of profit may go up for a while. But when things settled down again to normal hum-drum capitalism, the tendency of the rate of profit to decline will return.
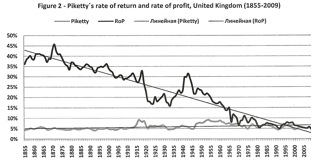
Fig. 1: P/C (Marx) upper sloping graph; P/W (Piketty) flatish graph at bottom.
Piketty claimed that his data showed that Marx was wrong; the rate of profit did not decline over the secular long-term but remained steady, he said. Maito in just 13 pages in Piketty against Piketty proved that Piketty is making an ass of himself; that he is comparing apples with oranges. A little simplified, it goes like this. Piketty defines rate of profit as [Total national profit of capitalist enterprises] divided by [Total wealth of the rich classes], say P/W. Marx, and I guess most economists, Smith and Ricardo included, defined the rate of profit as [Total national profit of capitalist enterprises] divided by [Total capital in action in the production process], say P/C. Piketty shows that P/W has remained steady, but what about P/C? His own data set is so rich, says Maito, that one could take Piketty’s W data, subtract from it non-production assets like private houses and private financial savings, and treat the remainder as capital in production; that is C. Actually what Maito did was to use a category called ‘total business assets’ available in Piketty’s data as a stand in for C.
The graph from Maito (fig. 1) comparing the Marx’s steeply declining P/C with Piketty’s steady P/W for the UK makes the point abundantly clear. Maito has another graph replicating this for Germany over the same time period, but I am not reproducing it because it looks the same.
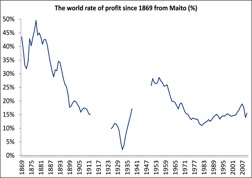
Fig. 2: Tendency of th Rate of Profit to Fall (as per Maito)
Another graph from Maito (fig. 2) details the world rate of profit. The secular decline in the global rate of profit over the last 130 years is abundantly clear; a fact that could not have been proved except by using the data that Piketty himself made available.
There are two obvious breaks in the graph during the two World Wars when no sense can be made of the data, and there is a sharp rise in the rate of profit during the New Deal when Roosevelt intervened with a heavy hand upsetting free market capitalism. It is also quite interesting to observe the slow steady rise in capitalist profitability from 1980 to 2007. Initially this was the period when neo-liberalism intervened and imposed politically driven repression of the working class and lowered real wages and living standards. This was followed by the post mid-1990s phase when China entered the global production chain revitalising production economics and boosting the profitability of Western companies that had invested heavily in the Dragon’s economy.
Critique of Pikkety on fundamentals
Unrepentant Marxists (I am one) have another problem with Piketty; he is made out to be a Marxist but he is not; he doesn’t claim to be one. The crucial difference is that for Marx and Marxists capitalism is a process, a system, an arrangement of the relations between classes. Piketty has no such depth; that is all too hard to understand, I guess he would say.
Capital Marx’s masterwork, to use Peradeniya philosophy professor Desmond Mallikarachchi’s term, is not a book on economics, nor as often described is it about political-economy. Desmond would say it’s about man, his material world and the refection of that world in men’s minds. Wages, prices, profits, the working day, the process of production, capital outlaid and revenue recovered, what is this set of things? Marx held a mirror to the world and this set of things was no more than a reflection of social relations in the real world; classes, struggles, power, exploitation and the structures and processes of society. There is this famous passage about reification in Volume 1, Chapter 1, Section 4 (Fetishism of Commodities).
“A commodity, therefore, is a mysterious thing simply because in it the social character of men’s labour appears to them as an objective character stamped upon the product of that labour; because the relation of the producers to the sum total of their own labour is presented to them as a social relation, existing not between themselves, but between the products of their labour. This is the reason why the products of labour become commodities”.
This is all Greek to Piketty. Marxists find it ridiculous that Piketty is passed off as a second Marx by an untutored bourgeois world despite his own strenuous insistence that he is not. Piketty exposed the inequality and the inequity of the capitalist world during the last 200 years. Why not say thank you and leave it at that?
Vibhushana / June 1, 2014
Hitler 6,000,000, Stalin 20,000,000, PolPot 1,000,000, Mao 5,000,000 JVP 100,000, LTTE 100,000.
These are numbers of people died per-mature death because of some coco-meme ‘Marxist’ ideology.
There so countless other revolutions, coup de et all trying to create the Marxist view of the world. Karl Marx is undoubtedly the biggest killer in the last century.
Capitalism with all its flaws never caused this much destruction in such a short period of time.
/
Dr Laksiri Fernando / June 1, 2014
Yes, at least Piketty should be thanked. The most challenging in the present century would be the glaring disparities emerging between the rich and the poor, mediated by the states for their own existence, jeopardizing democracy (functionally), and the environmental balance. Increasing violent political conflicts are another result. The three richest (men) in Australia own wealth more than the wealth of the lowest million people together. Marx’s TPRF was linked to his philosophical prediction of the crisis and possible collapse of European capitalism. There was nothing wrong in that.
I had a look at Piketty’s book and didn’t get the impression that philosophical Marxism might be Greek to Piketty. He of course comes from a different tradition as he explains in the Introduction. I was impressed by one of his conclusions: “That history of the distribution of wealth has always been deeply political, and cannot be reduced to purely economic mechanism.” The purpose of his study or intention is also admirable saying “I am interested in contributing, however modestly, to the debate about the best way to organize society and the most appropriate institutions and policies to achieve a just social order.”
/
mud / June 1, 2014
Good analysis
/
D.Nimal / June 1, 2014
Desmond Mallawaracchi is belongs to Trotskyist politics of that was by products of anarchism deadly against Marxism.
In his introduce new edition of Marx’s ‘Wage Labor and Capital’ in 1891 Engles said “.. far and wide as a magnificent exposition of the foundation of Marxist political economy particularly the theory of Surplus Value a strictly scientific treaties, but presented so comprehensibly that every average worker could read it, that with the progress of Capitalist production, with new invention and discovery. Hence the polarization of bourgeois society become more distinct and wealth produced by workers is appropriated to an ever greater extent by the owners of the means of production; while the part falling to the share of working class either increases only slowly and inconsiderably or not at all and under certain circumstances may even fall..”
Desmond and David both are Trotskyist in politics has to read short essay wrote by Lenin…. ‘ON THE QUESTION OF DIALECTIC express of few sentence of Capital on Marx theses.
Desmond and David are Hegelians philosophies who believed that what Hegel’s said ‘All that is real is rational; and all that rational is real’ this is philosophical justification of everything in existence of Trotskyists political philosophy not Marxists world outlook.
/
N.Wimaldasa / June 2, 2014
Capital volume I came to press on September 14 1867 that is 151 years ago. It was break bourgeois scholars silent proved first step by Marx the bourgeois scheme as the best means of warfare. The Germany media at that time silent about Capital. Needless to say it is extremely important that something should happen ,that main thing is for the book to be discussed again and again ALL THE TIMES.
Capital popularizing is an important among people is vital assignment of as ever to ready to serve the people of world.
Capital volume I the research and inversgation contained book are utmost scientific accuracy. It is masterly dialectical structure of the whole investigation to theory of commodity and money the transformation of money into CAPITAL, the introduction of NEW category of SURPLUS VAULE AND THE DIFFERENTITAION OF SURPLUS VALUE AND PROFIT (which Ricardo had not made) proving that not labor ,but labor-power was active on the MARKET.
Capital volume I Engels wrote “Marx Book display a historical approach which enabled its author to present economic laws not as eternal truths, but as definitions of the conditions of existence of certain transitory states of society.”
/